by R. Grothmann
In this notebook, we demonstrate techniques to compute such complicated things as B-splines.
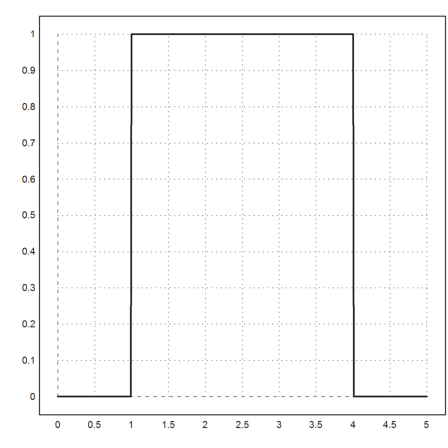
First, we start with the Haar function, which is the B-spline of order 0 on a set of knots, 1 on [t[k],t[k+1]].
>function N0 (x,k,t) := x>=t[k] && x<t[k+1]
We can recursively apply the Cox formula for B-Splines.
![]()
However, we must be careful not to divide through 0. Also, we must make sure, the function works for a vector x. Since t is also a vector, we protect it from being mapped.
>function map N (x,k,n;t) ...
## B-Spline on t[k:k+n+1] in x.
if n<=0 then return N0(x,k,t); endif;
if x<=t[k] then return 0;
else if x<t[k+n+1] then
sum=0;
if t[k]<t[k+n] then
sum=sum+N(x,k,n-1,t)*(x-t[k])/(t[k+n]-t[k]);
endif;
if t[k+1]<t[k+n+1] then
sum=sum+N(x,k+1,n-1,t)*(t[k+n+1]-x)/(t[k+n+1]-t[k+1]);
endif;
return sum;
endif;
return 0;
endfunction
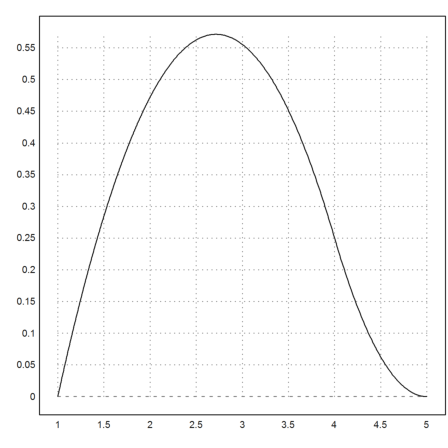
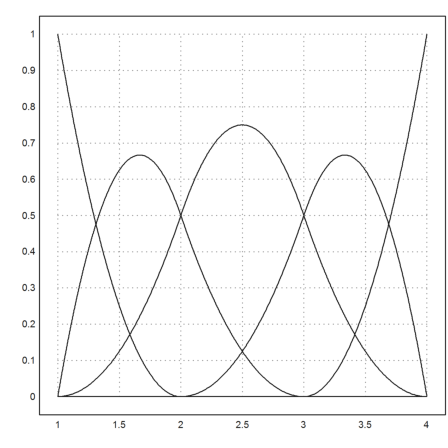
>plot2d("N";1,2,[1,2,3,4],a=1,b=4):
It does also work for multiple knots.
>plot2d("N";1,2,[1,1,1,4],a=1,b=4):
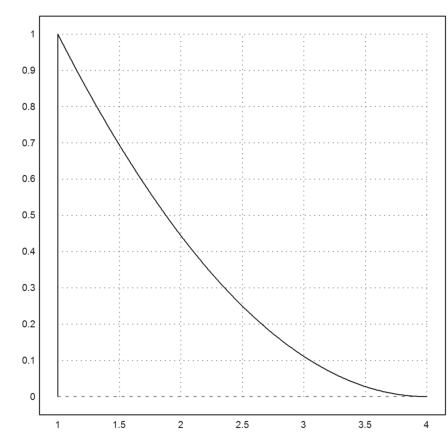
This function is already contained in Euler Math Toolbox. But it takes less effort and defines the spline recursively by
![]()
with a small epsilon. This avoids to check for the situation of x. The recursion formula can be applied immediately for row vectors x.
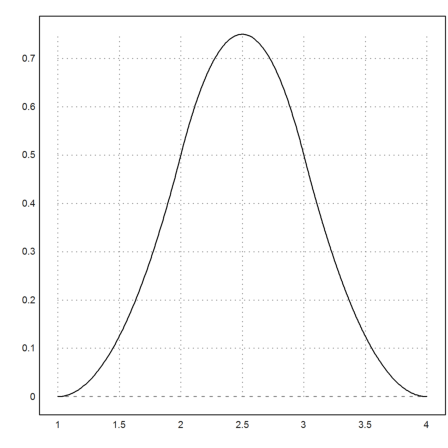
>plot2d("nspline";2,2,[1,1,1,4,5],a=1,b=5):
Let us write a function, plotting all B-Splines for a set of knots.
>function plotall (t,n) ...
// set the plot window:
plot2d(none,a=min(t)+epsilon,b=max(t)-epsilon,c=0,d=1);
loop 1 to cols(t)-n-1
plot2d("nspline";#,n,t,>add); // plot #-th B-spline
end
return plot();
endfunction
>plotall([1,1,1,2,3,4,4,4],2):
The B-splines add to 1. We compute all B-splines (row 1:m) at x-values (columns) and add the columns to get the sum.
Since NSpline() does vectorize to column vectors k the matrix language can be used.
>x=0:0.01:5; t=[1,1,1,2,3.1,4,4,4]; k=1:5; ... y=sum(nspline(x,k',2,t)')'; ... plot2d(x,y,thickness=2):
We can now approximate a function f() with splines by pseudo-interpolation.
![]()
Here, the spline N[k] is the B-spline around t[k].
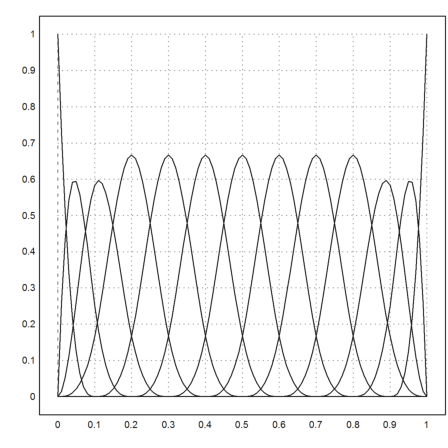
We first compute a matrix of B-Spline values for all a set of cubic B-Splines, which add to 1 on [0,1]. By construction, the last Spline with the knots [0.9,1,1,1,1] will be 0 in x=1. We fix that manually.
>t1=0:0.1:1; t=0|0|0|t1|1|1|1; x=0:0.01:1; ... B=nspline(x,(1:cols(t)-4)',3,t); B[-1,-1]=1; ... plot2d(x,B,a=0,b=1.2):
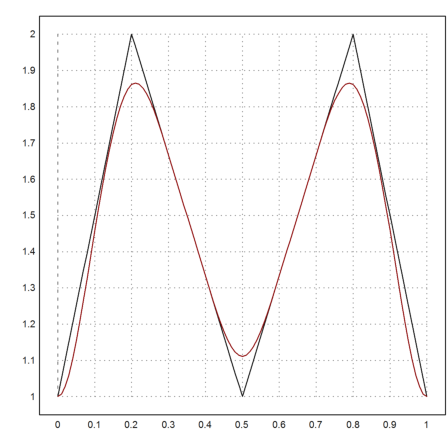
The Pseudo-Interpolation has the property that the derivative is 0 in x=0 and x=1. So the direct approach here is useful only in special situations.
>function f(x) := linsplineval(x,[0,0.2,0.5,0.8,1],[1,2,1,2,1]); ... plot2d(x,f(x)); ... plot2d(x,f(t[3:cols(t)-2]).B,color=red,>add):
Now we write a function, which computes a B-spline curve with support polygon through K (2xm or 3xm). The function will vectorize to x.
>function BSplineCurve (x,t,K) ... n=cols(t)-cols(K)-1; y=zeros(rows(K),cols(x)); loop 1 to rows(K) y[#]=sum(K[#]*nsplinemap(x',1:cols(K[#]),n;t))'; end return y; endfunction
Another function to plot the control polygon.
>function plotPolygon (K,add=1) ... plot2d(K[1],K[2],thickness=2,add=add); return plot2d(K[1],K[2],points=1,style="[]",add=1); endfunction
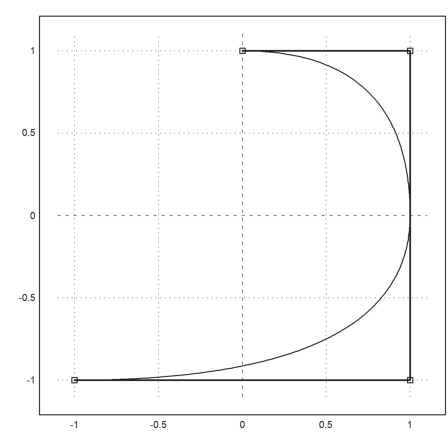
Let us test everything.
>t=[1,1,1,2,3,3,3]; K=[0,1,1,-1;1,1,-1,-1]; ... x=linspace(1.001,2.999,300); ... y=BSplineCurve(x,t,K); ... plot2d(y[1],y[2],a=-1.1,b=1.1,c=-1.1,d=1.1); ... plotPolygon(K):
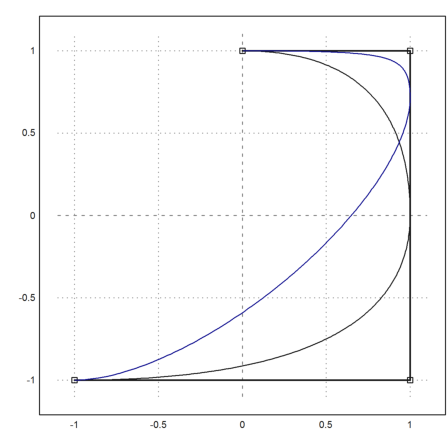
Now, we can combine everything to compute Nurbs. We need a vector of non-zero weights. Then we can compute the three dimensional Spline and project to z=1.
>function NurbsCurve (x,t,K,w) ... Kw=w*K_w; y=BSplineCurve(x,t,Kw); y=y/y[3]; return y[1:2]; endfunction
>w=[1,3,1/2,1]; y=NurbsCurve(x,t,K,w);
The nurbs are closer to the corners with higher weights.
>plot2d(y[1],y[2],add=1,color=4):
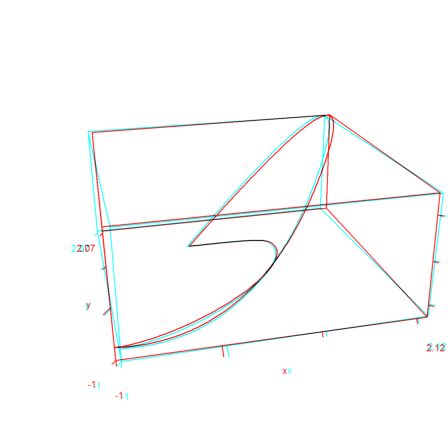
In the following anaglyph plot, we show the three dimensional weighted curve and its projection.
>y=BSplineCurve(x,t,K*w_w); h=y/y[3]; ... plot3d(y[1]_h[1],y[2]_h[2],y[3]_h[3], ... >lines,angle=-15°,>anaglyph,zoom=3.4):